Расширение мощностного ряда преобразователей частоты серии AD30 Optimus Drive до 30 кВт
Программируемые контроллеры Optimus Drive серий ME200, MX300 и MH1000: архитектура индустриальной автоматизации
Программируемые контроллеры Optimus Drive с поддержкой CoDeSys и DIADesigner-AX представляют собой современную линейку решений для промышленной автоматизации, объединяющую высокую производительность, расширенные коммуникационные возможности и гибкую программную платформу. Модельный ряд включает три серии – ME200, MX300 и MH1000— каждая из которых ориентирована на определённый класс задач.

Программная платформа и среды разработки
Контроллеры Optimus Drive серий ME200, MX300 и MH1000 – это семейство промышленных управляющих устройств, построенных на едином программном фундаменте – платформе CoDeSys (или его аналоге DIADesigner-AX). Это обеспечивает главное преимущество для новейшего производства – общую среду программирования. Тут заключается главное отличие от проприетарных систем управления, где требуется собственный инструмент программирования для каждой отдельной части системы.
CoDeSys (Controller Development System) реализует интернациональный стандарт МЭК 61131-3, разработанный Международной электротехнической комиссия (International Electrotechnical Commission). Этот стандарт определяет не просто набор команд, а целую парадигму структурированного программирования для распределённых систем управления в реальном времени.
Стандарт МЭК 61131-3 устанавливает пять языков программирования – три графических (LD, FBD, SFC) и два текстовых (ST, IL). Таким образом, алгоритм могут в наиболее привычной для себя форме реализовать разные специалисты:
- Инженеры-электронщики – как схему электрических соединений
- Специалисты по автоматизации – как блочную диаграмму
- Технологи – как последовательный процесс
- Программисты – как текстовую программу
Ключевым фактором также является поддержка библиотек SM3_Basics, SM3_Robotics и SM3_CNC вплоть до версии 4.20, соответствующих стандарту PLCopen. Данные библиотеки обеспечивают унифицированный подход к управлению движением и позволяют реализовывать сложные алгоритмы позиционирования с поддержкой высокоточных датчиков. Вы без особых трудозатрат сможете использовать уже созданную ранее программу, в том числе управления движением, на контроллерах Optimus Drive, тем самым снизив расходы на разработку при интеграции контроллеров в существующий проект или при смене устаревшего или пришедшего в негодность оборудования на производстве.
Собственные библиотеки Optimus Drive — локализованное решение для российского рынка
Наши инженеры подготовили собственный набор библиотек, адаптированных к специфике российской промышленности и регуляторной среды. Отметим, что выложенные на сайте пэкиджи – оригинальны и доступны только для контроллеров Optimus Drive.
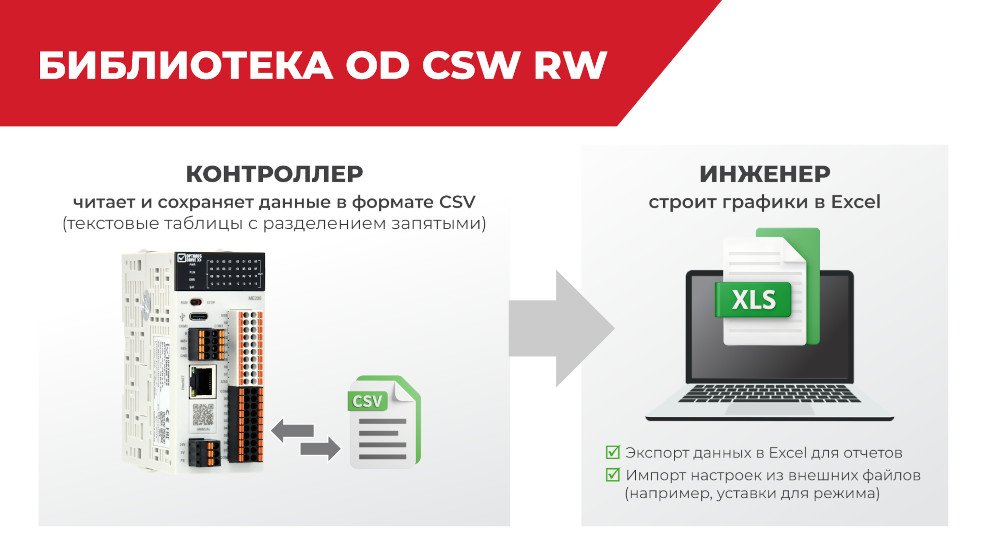
Библиотека OD CSV RW решает задачу обмена данными с системами управления процессом на уровне человека (операторы, технологи). CSV (Comma-Separated Values) – универсальный текстовый формат, работающий с таблицами, который используется Microsoft Excel и большинством промышленных SCADA-систем.
Ключевое отличие реализации Optimus Drive заключается в поддержке локализованных форматов данных: запятая как разделитель дроби, работа с датой и временем в формате, принятом в России.
Библиотека OD MySQL позволяет контроллеру напрямую взаимодействовать с базами данных через SQL-запросы. Это особенно важно для многоуровневой архитектуры автоматизации, где контроллер действует как промежуточный узел между датчиками и хранилищем данных. Вместо ручного написания скриптов экспорта данных, контроллер может автоматически записывать ключевые показатели (температуру, давление, время цикла) в базу данных для последующего анализа и диагностики.
Библиотека OD MQTT реализует поддержку легковесного протокола обмена сообщениями для большинства платформ интернета вещей (IoT). MQTT (Message Queuing Telemetry Transport) – открытый протокол, построенный на модели издатель-подписчик (pub/sub), где каждое устройство может публиковать данные в определённый тематический канал («топик»), а другие устройства подписываются на необходимые им «топики». Это обеспечивает передачу телеметрии между компонентами с невысокой производительностью и ограниченными ресурсами – новые датчики и системы мониторинга можно интегрировать без изменений конфигурации основной программы контроллера.
Библиотека OD Files облегчает задачу управления файловой системой контроллера. Она упрощает работу с записью/чтением энергонезависимых переменных и автоматизирует работу по созданию папок/подпапок при копировании файлов с внешних носителей в контроллер и обратно.
Наконец, поддержка протоколов NTP и FTP решает две практические задачи. NTP (Network Time Protocol) обеспечивает синхронизацию времени между контроллером и периферией или между несколькими контроллерами с высокой точностью. Данная опция пригодится для систем, где время играет ключевую роль и несколько контроллеров должны выполнять действия в один и тот же момент времени. Наличие FTP (File Transfer Protocol) позволяет контроллеру выступать клиентом и загружать файлы конфигурации с сервера.
Специализированное решение для управления асинхронными двигателями по EtherCAT
В некоторых случаях с помощью контроллера требуется решить специфическую инженерную задачу – использовать асинхронный двигатель с короткозамкнутым ротором (АДКЗ) как ось с обратной связью по положению, а не просто как источник крутящего момента. Этот принцип управления называется принципом «гибкой» оси и обеспечивает точное циклическое синхронное позиционирование через частотный преобразователь, работающий по сети EtherCAT.

Для этого специально разработана библиотека OD Inverter CSP Control. Архитектура системы при этом может выглядеть следующим образом:
- На валу асинхронного двигателя устанавливается энкодер (1000 импульсов на оборот).
- Энкодер подключается к импульсным входам контроллера PAC-класса (МX300 или MH1000).
- Преобразователь частоты подключен к контроллеру через сеть EtherCAT и выступает осью.
- В контроллере работает вложенный контур позиционирования: внешний контур отслеживает желаемое положение оси, внутренний контур управляет скоростью через ПЧ, используя обратную связь от энкодера.
Данное решение позволяет строить жёсткие синхронные системы для конвейеров, упаковочного оборудования, логистических систем, а также для синхронизации разнородных приводных систем – частотно-регулируемых приводов и сервоприводов.
Практические преимущества архитектуры Optimus Drive
В завершение выделим главные преимущества системного использования наших решений, отличающие их от большинства представленных на рынке продуктов схожего класса и ценового диапазона.
Концепция Single Source of Truth (SSOT), или единственного источника истины.

В традиционных системах автоматизации каждый компонент (контроллеры, панели оператора, сервер диспетчеризации, исполнительные механизмы) имеет свою версию данных о состоянии оборудования. Так создаётся проблема рассинхронизации: к примеру, если ПЛК видит датчик включённым, а панель оператора определяет его как выключенный, нет строгого понимания, какой из источников данных достоверен.
Архитектура Optimus Drive, основанная на CoDeSys или DIADesigner-AX, даёт возможность реализовать единую базу данных состояния благодаря OD MySQL. Все системы (контроллер, SCADA, HMI-панель оператора) обращаются к одному источнику, что значительно снижает количество возможный ошибок.
Переносимость проектов между несколькими поколениями компонентов системы.
В ситуациях, когда производство масштабируется, появляются участки линии, требующие большей производительности или замены оборудования, зачастую необходимо полностью переписать программы на новоприобретённом контроллере.
С CoDeSys-совместимыми контроллерами Optimus Drive большая часть программы останется неизменной, вам потребуется лишь сделать адаптацию. Это поможет сократить время на реализацию до 80%, сэкономив до нескольких месяцев работы специалистов.
Уменьшение трудозатрат на отладку и обслуживание.
Встроенные инструменты CoDeSys позволяют диагностировать неполадки непосредственно на контроллере, без необходимости установки дополнительных устройств. При появлении ошибки ответственный инженер может быстро загрузить параметры текущего состояния, проанализировать переменные и в точности оценить, что произошло.
Всё вышесказанное делает системы на базе ПЛК и ПАК Optimus Drive привлекательным решением как для новых проектов в области автоматизации, так и для модернизации существующих систем на российских предприятиях. Кратко и наглядно преимущества наших контроллеров описаны в листовке, доступной для скачивания в разделах «Документация и софт» каждой серии.
21 января 2026г.
В нашей номенклатуре широко представлены преобразователи частоты для различных применений, устройства плавного пуска, сервоприводы и планетарные редукторы для точного и высокоточного оборудования, промышленные контроллеры, панели оператора, термоконтроллеры и энкодеры.
-
- Адрес
- 105094, Россия, Москва, ул. Семёновский Вал, дом 6А
-
- Телефон
-
- sales@optimusdrive.ru
-
- Мы работаем:
- Пн.-Пт: 9:00-17.30
- Мы в соцсетях:


Последние новости