Система управления оборудованием на основе программируемого контроллера MX300 и сети EtherCAT с разветвителями SC5
Решения компании ОПТИМУС ДРАЙВ на базе программируемых контроллеров автоматизации (PAC) серии MX300 и сети EtherCAT с разветвителями серии SC5 позволяют создавать гибкие системы управления промышленным оборудованием с распределенным сетевым подключением модулей ввода/вывода, приводов и других устройств.
Системы автоматизации, обеспечивающие синхронную работу большого числа механизмов технологического оборудования на высоких скоростях в реальном времени, востребованы во многих отраслях промышленности. Сегодня подобные системы строятся на основе современных контроллеров PAC-класса, таких как серия MX300 от компании ОПТИМУС ДРАЙВ.
Высокопроизводительная вычислительная система MX300 обеспечивает возможность управления 8, 16 или 32 сервоприводами (в зависимости от модели) через встроенный порт EtherCAT с периодом от 500 мксек. В состав серии MX300 входит также EtherCAT-станция удаленного ввода/вывода с возможностью подключения к ней до 32 модулей расширения MX.
Промышленная сеть реального времени EtherCAT
Фактически EtherCAT представляет собой сеть семейства Industrial Ethernet, созданную для распределенного управления устройствами промышленного оборудования в реальном времени. Скорость обмена данными в сети соответствует стандарту Fast Ethernet (100BASE-TX) и составляет 100 Мбит/с. Максимальное расстояние между двумя узлами сети при использовании витой пары — 100 м.
Стандартно промышленная сеть EtherCAT строится по линейной топологии (рис. 1). Это вызвано тем, что ведомые узлы EtherCAT обычно оснащаются двумя портами, один из которых используется для подключения к предыдущему устройству, а второй – для подключения к сети следующего устройства. Такой подход обеспечивает удобство интеграции без применения дополнительного активного оборудования, однако при этом он существенно ограничивает свободу размещения EtherCAT-узлов. Кроме того, при линейном подключении при нарушении связи между соседними узлами (например, в случае обрыва кабеля или отключения устройства) прекращается обмен данными между контроллером и всеми последующими участниками сети.
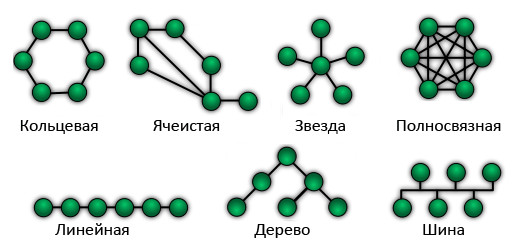
Рис. 1. Основные виды сетевых топологий
Эффективным и надежным способом устранения этих недостатков линейной топологии является построение сети по топологии звезда или смешанной топологии (рис. 2). В этом случае центральным узлом сети становится многопортовый разветвитель EtherCAT, к каждому порту которого подключается контроллер и ведомые узлы, включая приводы и станции удаленного ввода/вывода. От каждого ведомого узла, подключенного к разветвителю, можно вести линейные ответвления, тем самым формируя смешанную топологию сети.
Также при проработке конфигурации следует иметь в виду, что в одной сети EtherCAT могут использоваться несколько разветвителей, образуя так называемые «каскадные подключения», что может оказаться востребованным для оптимального взаимного расположения устройств в системе управления.
EtherCAT-разветвитель серии SC5 — распределенных промышленных сетей
Для построения звездообразной или смешанной топологии EtherCAT компания ОПТИМУС ДРАЙВ предлагает промышленные разветвители EtherCAT серии SC5. Серия представлена моделями на 4 и 6 портов, устройства имеют антистатический корпус с креплением на DIN-рейку и питаются от источника с напряжением 24 В= (диапазон 18...30 В=).
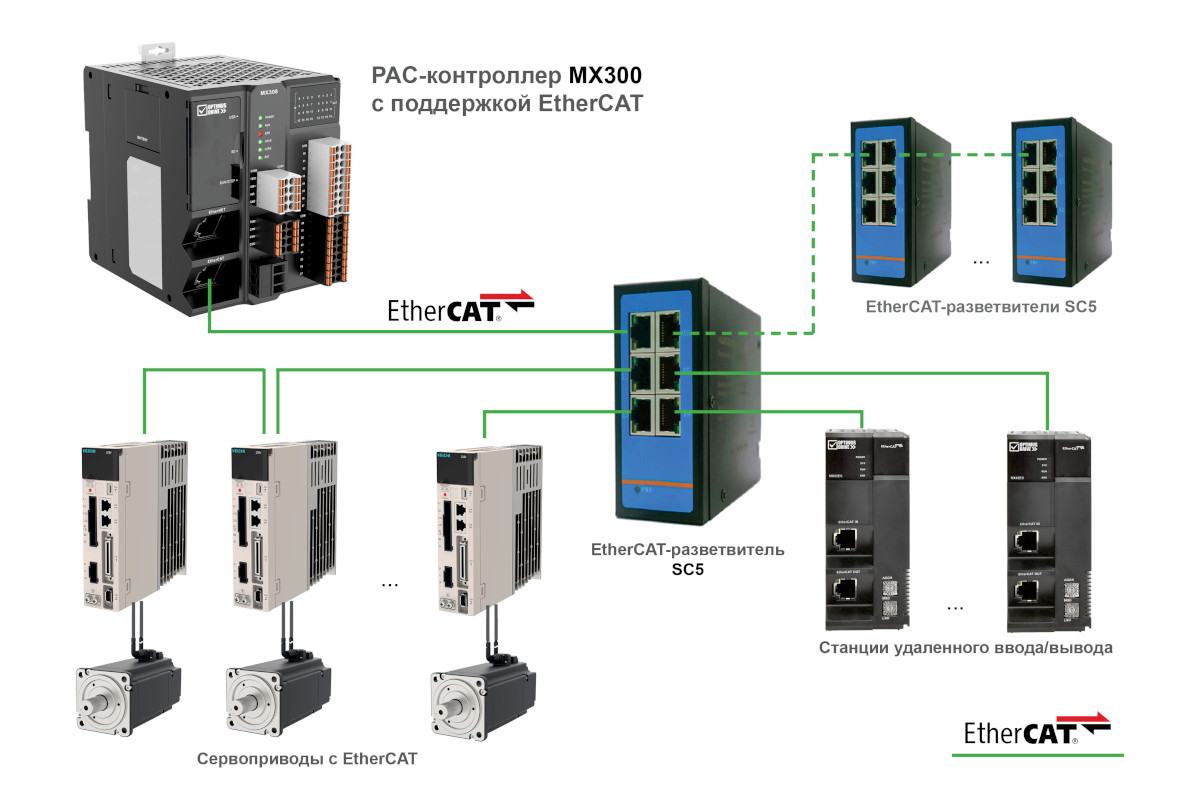
Рис. 2. Система управления на базе программируемого контроллера серии MX300 с сетью EtherCAT и разветвителями серии SC5 (топология)
Ключевое отличие разветвителей SC5 от стандартных промышленных коммутаторов Ethernet заключается в поддержке технологии распределенных часов EtherCAT (Distributed Clock или DC). Распределенные часы лежат в основе аппаратной синхронизации обмена данными между мастером и всеми ведомыми узлами сети EtherCAT.
Высокопроизводительная элементная база EtherCAT-разветвителей серии SC5 обеспечивает быстрый отклик — задержка передачи данных составляет около 1 мксек на порт, а восстановление обмена данными при отключении/подключении узла составляет не более 200 мсек.
Для работы устройств EtherCAT с разветвителем SC5 необходимо использовать экранированный кабель Ethernet/EtherCAT категории 5e или выше. Максимальное расстояние между CS5 и каждым подключаемым узлом составляет 100 м.
В разветвителях SC5 реализованы защита от перенапряжения и электромагнитных помех, что особенно важно в промышленных условиях эксплуатации. Диапазон рабочих температур: от -10 до +55°С.
Таким образом, применение разветвителей серии SC5 в значительной степени повышает гибкость решений автоматизации технологического оборудования на основе программируемых контроллеров ОПТИМУС ДРАЙВ серии MX300 с распределенным управлением по сети EtherCAT.
22 февраля 2024г.
В нашей номенклатуре широко представлены преобразователи частоты для различных применений, устройства плавного пуска, сервоприводы и планетарные редукторы для точного и высокоточного оборудования, промышленные контроллеры, панели оператора, термоконтроллеры и энкодеры.
-
- Адрес
- 105094, Россия, Москва, ул. Семёновский Вал, дом 6А
-
- Телефон
-
- sales@optimusdrive.ru
-
- Мы работаем:
- Пн.-Пт: 9:00-17.30
- Мы в соцсетях:



Последние новости