Расширение мощностного ряда преобразователей частоты серии AD30 Optimus Drive до 30 кВт
Характеристики серии EA100 сервоусилителей
Серия EA100 - это высоко-производительный сервопривод общего назначения, который справится с широким кругом задач в различных областях промышленности.
Основные характеристики
- Высокопроизводительная аппаратная часть: 32-битный высокопроизводительный ЦСП.
- Диапазон регулирования скорости 1:3000 (1:5000).
- Высокая перегрузочная способность: крутящий момент может быть в 3 раза выше номинальной нагрузки.
- Высокодинамичный отклик: пропускная способность контура управления может достигать 250Гц (1кГц).
- Высокая точность управления положением: большая точность автотрекинга, быстрое позиционирование на высоких скоростях, отсутствие задержек и колебаний в режиме останова.
- 6 режимов управления: положением, скоростью, моментом, а также 3 гибридных режима - момент/скорость, скорость/положение и момент/положение.
- Оснащен светодиодным 5-знаковым дисплеем, имеет 5 кнопок управления.
- Программируемые дискретные входы/выходы: 10 DI / 5 DO.
- Аналоговые входы/выходы: 3 AI / 2 AO.
- 16 фиксированных скоростей; 16 фиксированных положений.
- Коммуникационные порты RS-232 и RS-485, вход для подключения внешнего тормозного резистора, вход подключения энкодера.
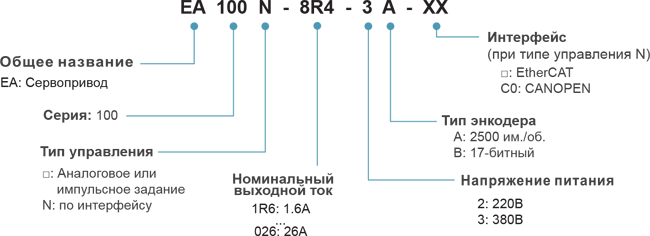
Расшифровка обозначения моделей сервоприводов EA100
Параметры сервоусилителей серии EA100
| Параметры | Значение | |||
| Обратная связь | EA100: энкодер 2500 имп./об. ; инкрементальный и абсолютный энкодеры 17-бит EA100N: инкрементальный 17-бит; абсолютный энкодер 23-бит |
|||
| Динамическое торможение | Встроенные тормозной ключ и резистор, внешний тормозной резистор при необходимости | |||
| Температура окружающей среды | Рабочая температура: 0~40°C . Температура хранения: -20°C ~85°C | |||
| Способ охлаждения | Вентилятор | |||
| Режим управления скоростью/ моментом |
Точность поддержания скорости | При изменении нагрузки | 0~100% нагрузка: макс. 0.3% | На основании сигнала с 23-бит энкодером при номинальной скорости вращения |
| При отклонении напряжения питания | Номинальное напряжение±10%: макс. 0.3% | |||
| При изменении темп. окружающей среды | 0~ 50°C : макс. 0.3% | |||
| Диапазон регулирования скорости | 1:3000 (энкодер 2500 имп/об) | Обеспечение равномерной работы на минимальной скорости при номинальной нагрузке | ||
| 1:5000 (энкодеры 17-бит и 23-бит) | ||||
| Полоса пропускания | 250Гц (энкодер 2500 имп/об) | |||
| 1.0кГц (энкодеры 17-бит и 23-бит) | ||||
| Точность управления моментом | ±3% | |||
| Настройка времени разгона/торможения | 0~30 сек | |||
| Режим управления позиционированием | Компенсация перерегулирования | 0~100% (разрешение: 1%) | ||
| Точность позиционирования | 1~65535 командных единиц (разрешение: 1 командная единица) | |||
| Задержка позиционирования, не более | 5 мс (без нагрузки, с номинальной скоростью до выполнения позиционирования) | |||
| Параметры | Значение | |||||
| Управление скоростью/ моментом | Сигналы управления |
По скорости | Сигнал по напряжению | ±10В Разрешение 12 бит (Двигатель вращается вперед при положительном сигнале) | ||
| Входное сопротивление | около 5.1 кОм | |||||
| Постоянная времени входа | около 200 мс | |||||
| По моменту | Сигнал по напряжению | ±10В Разрешение 12 бит | ||||
| Входное сопротивление | около 5.1 кОм | |||||
| Постоянная времени входа | около 200 мс | |||||
| Многоскоростная команда | Используется комбинация сигналов DI5 (CMD0), DI6 (CMD1), DI7 (CMD2), DI8 (CMD3) для достижения 16 скоростей | |||||
| Управление позиционированием |
Сигналы управления |
Команда | Тип входа | Дифференциальный сигнал; открытый коллектор | ||
| Импульс | Тип импульса | Импульс + направление; А,В - сигналы; CW/CCW | ||||
| Входящий частотный импульс | Дифференциальный сигнал: макс. 500 000 имп/сек Открытый коллектор: макс. 200 000 имп/сек | |||||
| Команда импульсного фильтра | Задаются параметры фильтрации импульсной команды | |||||
| Многопозиционная команда | Используется комбинация сигналов DI5 (CMD0), DI6 (CMD1)-, DI7 (CMD2), DI8 (CMD3) для достижения 16 позиций (Дополнительно задать сигнал триггера CTRG) | |||||
| 16 пошаговых позиций, используйте клемму CTRG для переключения | ||||||
| Режимы сглаживания по входу | Низкочастотный сглаживающий фильтр, фильтр среднего значения | |||||
| Встроенный источник питания с открытым коллектором | +24 В | |||||
| Входное сопротивление по входу | Открытый коллектор: 2.2 кОм | |||||
| Дифференциальный привод: 200 кОм | ||||||
| Входной/ выходной сигнал |
Позиционный выход | Тип выхода | Фаза A > Фаза B > Фаза Z: дифференциальный выход | |||
| Фаза Z: выход оптопара | ||||||
| Фаза Z: регулирование длительности импульса, максимум 1.5 мс | ||||||
| Частотное разделение | Произвольная частота, задание частоты с энкодера | |||||
| Дискретный вход | 8 DI | ВКЛ/ВЫКЛ сервопривода, сброс ошибки, очистка регистра ошибок импульсов позиционирования, выбор направления в команде задания скорости, обнуление, триггер внутренней команды, переключение режима управления, запрет импульса, начальный и конечный концевые выключатели, предел второго значения момента, положительный и отрицательный jog и т.д. | ||||
| Дискретный выход | 4 DO | ВКЛ/ВЫКЛ сервопривода, выход на тормоз, выход на пуск двигателя, сигнал нулевой скорости, скорость приближения, скорость подхода, позиция начала приближения, позиция начала подхода, ограничение момента, ограничение скорости, тревожный выход, выход индикации ошибок и др. | ||||
| Встроенная функция | Защита от выхода за предельные позиции | Замедление до останова по сигналу концевых выключателей | ||||
| Режим Homing | 32 подрежима (способа) | |||||
| Электронный редуктор | N/M | N: 1~65535, M: 1~65535 | 4 электронных редуктора переключаются сигналом на соответствующую клемму | |||
| LED дисплей | 5 разрядный; индикатор работы силовых цепей CHARGE | |||||
| Функции защиты | Перенапряжение, недостаточное напряжение, превышение скорости, перегрев, перегрузка, ошибка энкодера,значительная ошибка позиционирования, ошибка памяти EEPROM и др. | |||||
| Аналоговый выход для монитора | 2 AO: DC0~10В, Макс. вых. ток 1мA | |||||
| Установка необходимого монитора | ||||||
| Коммуникация | Режим коммуникации | RS232, RS485, CAN | ||||
| Коммуникационный протокол | Modbus RTU, CANopen | |||||
| Другое | Два переключателя, автоматическая регулировка усиления,4 группы записанных тревожных сигналов, работа в режиме JOG | |||||
Каталог продукции
- Выгодная распродажа !
- Преобразователи частоты
- Сервоприводы и редукторы
- Сервоусилители серии OSD-G Optimus Drive
- Серводвигатели серии OSM-X5/H Optimus Drive
- Аксессуары для Servo OSD-G Optimus Drive
- Сервоусилители серии OSD-H Optimus Drive
- Серводвигатели серии OSM-M Optimus Drive
- Аксессуары для Servo OSD-H Optimus Drive
- Низковольтные сервоусилители серии SD100 VEICHI
- Низковольтные серводвигатели V7E (24-72 В) VEICHI
- Сервоусилители серии SD700 VEICHI
- Серводвигатели V7E, V9E, VM7 VEICHI
- Аксессуары для Servo Veichi
- Сервопривод шпинделя серии SD500 VEICHI
- Шпиндельные серводвигатели CM VEICHI
- Аксессуары для SD500 Veichi
- Сервоусилители серии SD780 VEICHI
- Асинхронные серводвигатели OSM OPTIMUS DRIVE
- Планетарные редукторы
- Программируемые контроллеры
- Панели оператора и мониторы
- Температурные контроллеры
- Устройства плавного пуска
- Техническое зрение
- Системы ЧПУ
- Энкодеры, штурвалы и оптические линейки
- Промышленные коммутаторы
- Разветвители EtherCAT
Архив продукции
В нашей номенклатуре широко представлены преобразователи частоты для различных применений, устройства плавного пуска, сервоприводы и планетарные редукторы для точного и высокоточного оборудования, промышленные контроллеры, панели оператора, термоконтроллеры и энкодеры.
-
- Адрес
- 105094, Россия, Москва, ул. Семёновский Вал, дом 6А
-
- Телефон
-
- sales@optimusdrive.ru
-
- Мы работаем:
- Пн.-Пт: 9:00-17.30
- Мы в соцсетях:


Последние новости